Hugo Tian

Hugo Tian
PhD Student
Hugo is a part-time PhD student. He received his Bachelor degree in electric engineering and automation from Northwestern Polytechnical University in Xi’an China and Master Degree in computer architecture from Huazhong University of Science and Technology in Wuhan China.
He’s worked in GPU ASIC industry as a software engineer for over 10 years. He is familiar with GPU low level programming.
Hugo is currently working on “Using real time scene capturing in AR remote collaboration” under supervision of Prof. Mark Bullinghurst, Dr. Gun Lee and Dr. Huidong Bai.
Projects
-
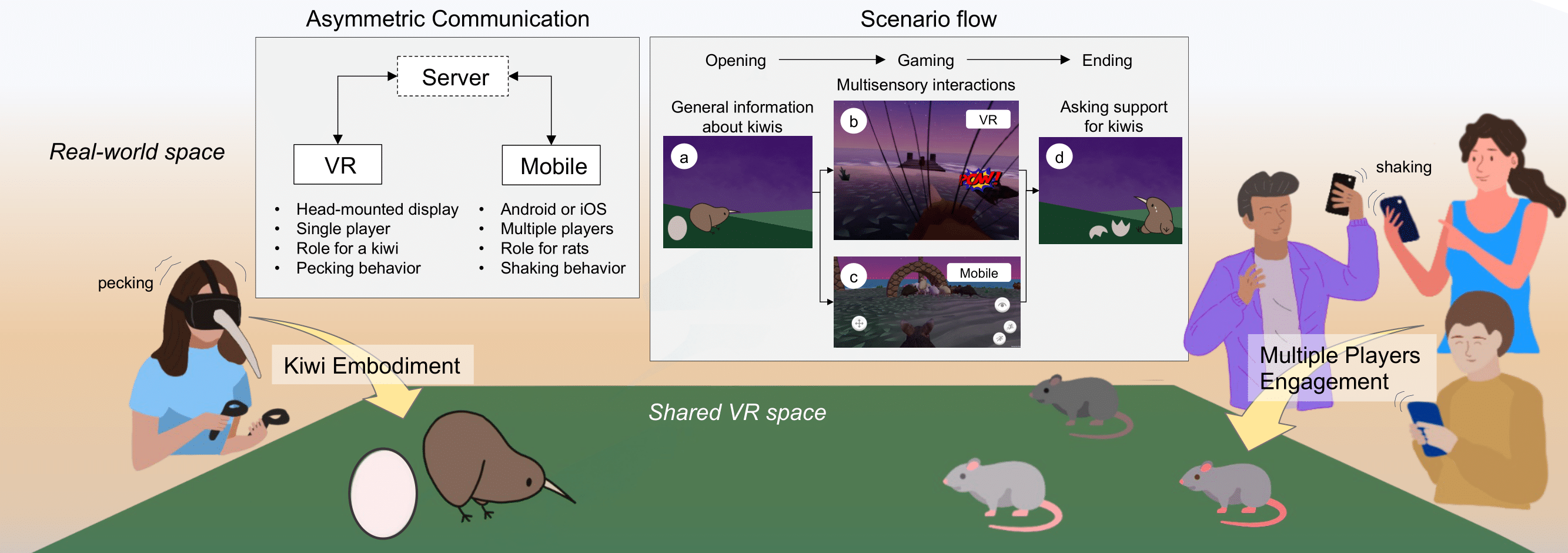
KiwiRescuer: A new interactive exhibition using an asymmetric interaction
This research demo aims to address the problem of passive and dull museum exhibition experiences that many audiences still encounter. The current approaches to exhibitions are typically less interactive and mostly provide single sensory information (e.g., visual, auditory, or haptic) in a one-to-one experience.
Publications
-
Using Virtual Replicas to Improve Mixed Reality Remote Collaboration
Huayuan Tian, Gun A. Lee, Huidong Bai, and Mark Billinghurst.Tian, H., Lee, G. A., Bai, H., & Billinghurst, M. (2023). Using virtual replicas to improve mixed reality remote collaboration. IEEE Transactions on Visualization and Computer Graphics, 29(5), 2785-2795.
@article{tian2023using,
title={Using virtual replicas to improve mixed reality remote collaboration},
author={Tian, Huayuan and Lee, Gun A and Bai, Huidong and Billinghurst, Mark},
journal={IEEE Transactions on Visualization and Computer Graphics},
volume={29},
number={5},
pages={2785--2795},
year={2023},
publisher={IEEE}
}In this paper, we explore how virtual replicas can enhance Mixed Reality (MR) remote collaboration with a 3D reconstruction of the task space. People in different locations may need to work together remotely on complicated tasks. For example, a local user could follow a remote expert's instructions to complete a physical task. However, it could be challenging for the local user to fully understand the remote expert's intentions without effective spatial referencing and action demonstration. In this research, we investigate how virtual replicas can work as a spatial communication cue to improve MR remote collaboration. This approach segments the foreground manipulable objects in the local environment and creates corresponding virtual replicas of physical task objects. The remote user can then manipulate these virtual replicas to explain the task and guide their partner. This enables the local user to rapidly and accurately understand the remote expert's intentions and instructions. Our user study with an object assembly task found that using virtual replica manipulation was more efficient than using 3D annotation drawing in an MR remote collaboration scenario. We report and discuss the findings and limitations of our system and study, and present directions for future research.